Läpi sumun ja heinäsirkkaparven16.09.2020
Stanfordin tutkijat ovat uudella algoritmilla rekonstruoineet yksittäisten valohiukkasten liikkeet nähdäkseen pilvien, sumun ja muiden esteiden läpi. Tutkijat tukeutuivat järjestelmässään erittäin tehokkaaseen algoritmiin, joka pystyy rekonstruoimaan kolmiulotteiset piilotetut näkymät yksittäisten fotonien liikkeen perusteella. Testeissä järjestelmä onnistui rekonstruoimaan muodot, jotka olivat yhden tuuman paksuisen vaahtolevyn takana. Tämä tekniikka täydentää muita näköjärjestelmiä ja keskittyy sellaisiin tilanteisiin, kuten itseajavien autojen navigointiin sumussa tai rankkasateessa sekä satelliittikuviin Maan ja muiden planeettojen sumean ilmakehän läpi. Aiemmissa järjestelmissä tuotaessa esiin piilossa olevia esineitä, tarvitaan esimerkiksi tietoa siitä, kuinka kaukana kiinnostava kohde on ja yleensä ne hyödyntävät vain ballistisia, ilman sirontaa kulkevia fotoneja. "Olimme kiinnostuneita siitä, että saisimme kuvattua ilman näitä oletuksia mutta keräämällä kaikki sironneet fotonit kuvan rekonstruoimiseksi", kertoi jatko-opiskelija David Lindell. "Tämä tekee järjestelmästämme erityisen hyödyllisen suurissa sovelluksissa, joissa ballistisia fotoneja olisi hyvin vähän." Piilotettujen esineiden kirkkaudesta riippuen skannaus testeissä kesti minuutista tuntiin, mutta algoritmi rekonstruoi kohteen nopeasti kannettavalla tietokoneella. Lähitulevaisuudessa tutkijat haluavat kokeilla erilaisia sirontaympäristöjä simuloidakseen muita olosuhteita, joissa tämä tekniikka voi olla hyödyllistä. Miljoonien heinäsirkkojen parvet lentelevät taivaalla ja pelloilla mutta yksittäiset hyönteiset eivät törmää toisiinsa näissä massiivisissa parvissa. "Eläimillä on usein epätavallisia kykyjä, jotka tekevät jotain paremmin kuin ihminen", sanoo Penn Staten apulaisprofessori Saptarshi Das. "Hyönteisten näkökyky on jotain, jota ihmiset käyttävät automaattisten järjestelmien suunnittelussa." Huomasimme, että heinäsirkat ovat ainutlaatuisia, koska ne käyttävät törmäyksenestoon vain yhtä erikoistunutta hermosolua (Lobula Giant Movement Detector). "Joten aloimme tarkastella, miten se toimii ja heinäsirkat ovat vain uskomattomia", Das hämmästelee. "Se, mitä nämä olennot voivat tehdä, on hyvin nöyryyttävää."
Jatko-opiskelija Darsith Jayachandranin mukaan neuroni vastaanottaa kaksi erilaista signaalia. Kuva lähestyvästä heinäsirkasta tulee välttävän heinäsirkan silmään ja mitä lähemmäksi se pääsee, sitä suurempi kuva on ja sitä vahvemmaksi tämä virityssignaali tulee. Toinen tulo on lähestyvän heinäsirkan kulmanopeuden muutos välttävän heinäsirkan suhteen. "Koska neuronilla on kaksi haaraa, heinäsirkka laskee muutokset näissä kahdessa sisääntulossa ja tajuaa, että törmäys uhkaa", Jayachandran sanoo. "Joten sen välttämiseksi heinäsirkka muuttaa suuntaa." Tutkijat kehittivät pienikokoisen, nanokokoisen törmäystunnistimen, jossa valomittarina käytettiin yksikerroksista molybdeenisulfidia. He sijoittivat valoilmaisimen ohjelmoitavan kelluvan portin muistiarkkitehtuurin päälle, joka voi jäljitellä heinäsirkan neurovastetta vain pienellä määrällä energiaa. Tutkijoiden mukaan heinäsirkat liikkuvat nopeudella 2–3 mailia tunnissa ja tekevät suunnanmuutoksia sadoissa millisekunneissa. Muuttamispäätös hyödyntää epälineaarista matematiikkaa pienellä energiankulutuksella. Näinkin nopea reaktio ja vaatimaton energiankäyttö ovat houkuttelevia mekanisoiduille törmäysilmaisimille. Tässä vaiheessa tutkijat ovat testanneet laitetta vain esineillä, jotka ovat suoraan törmäyskurssilla mutta esimerkiksi usean pikselin törmäystunnistinryhmä voi välttää törmäyksiä 3D-tilassa." Aiheesta aiemmin: |
Nanotekniikka on tulevaisuuden lupaus. Näillä sivuilla seurataan elektroniikkaa sekä tieto- ja sähkötekniikkaa sivuavia nanoteknisiä tiedeuutisia.
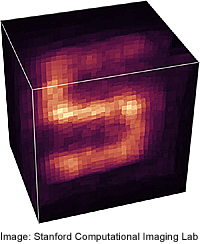 Kolmiulotteinen rekonstruktio tuuman paksuisen vaahtoseinämän läpi sironnalla luetusta S-kirjaimesta.
Kolmiulotteinen rekonstruktio tuuman paksuisen vaahtoseinämän läpi sironnalla luetusta S-kirjaimesta.  Nyt joukko insinöörejä on luomassa pienen tehonkäytön törmäystunnistinta, joka jäljittelee heinäsirkkojen kolarintorjuntaa ja menetelmä voi auttaa robotteja, droneja ja jopa itseajavia autoja välttämään törmäyksiä.
Nyt joukko insinöörejä on luomassa pienen tehonkäytön törmäystunnistinta, joka jäljittelee heinäsirkkojen kolarintorjuntaa ja menetelmä voi auttaa robotteja, droneja ja jopa itseajavia autoja välttämään törmäyksiä.