Kohti älykkäitä mikrorobotteja11.11.2019
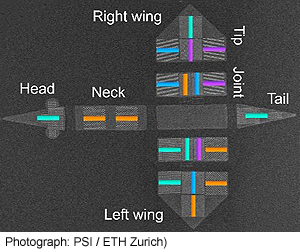
Paul Scherrer instituutin (PSI) ja ETH Zürichin tutkijat ovat kehittäneet mikrokoneen, joka voi suorittaa erilaisia toimintoja. Näissä olevat ensimmäiset nanomagneetit ohjelmoidaan magneettisesti ja sitten erilaisia liikkeitä ohjataan magneettikentän avulla. Sellaisia koneita, joiden poikkipinta-ala on vain muutama kymmenen mikrometriä, voitaisiin käyttää esimerkiksi ihmiskehossa pienten toimenpiteiden suorittamiseen. Mikrometrien kokoinen lintumainen robotti liikuttaa rakenteitaan ohjatun magnetismin avulla. Se läpyttää siipiään tai taivuttaa kaulaansa ja vetää päänsä takaisin. Tutkijat ovat koonneet sen joustavista materiaaleista, jotka sisältävät pieniä nanomagneetteja. Nämä nanomagneetit voidaan ohjelmoida huomioimaan tietty magneettinen suunta. Kun ohjelmoidut nanomagneetit altistetaan magneettikentälle, niihin kohdistuvat voimat saavat komponentit liikkumaan ohjelmoidulla tavalla. Nanomagneetit voidaan ohjelmoida uudestaan ja uudestaan. Tämä uudelleenohjelmointi johtaa erisuuntaisiin voimiin ja tuloksena ovat uudet liikkeet. Mikrorobotin rakentamiseksi tutkijat valmistivat kobolttimagneettiryhmiä ohuille piinitridilevyille. Tästä materiaalista valmistettu lintu voisi sitten esittää erilaisia liikkeitä, kuten räpytys, leijuminen, kääntyminen tai sivuliukuminen.
Tämä uusi käsite on tärkeä askel kohti mikro- ja nanorobotteja, jotka eivät vain tallenna tietoa tietyn toiminnan suorittamiseksi, vaan se voidaan myös ohjelmoida uudelleen suorittamaan erilaisia tehtäviä. "On ajateltavissa, että tulevaisuudessa itsenäinen mikrokone liikkuu ihmisen verisuonten läpi ja suorittaa biolääketieteellisiä tehtäviä, kuten tappaa syöpäsoluja", selvittää ETH Zürichin Bradley Nelson. Myös muut sovellusalueet ovat mahdollisia, esimerkiksi joustava mikroelektroniikka tai mikroelementit, jotka muuttavat optisia ominaisuuksiaan. Lisäksi mahdolliset sovellukset, joissa pintojen ominaisuudet muuttuvat. "Niitä voidaan esimerkiksi käyttää luomaan pintoja, jotka voivat joko kastua vedellä tai hylkiä vettä", sanoo Mesoscopic Systems Labin insinööri ja tutkija Jizhai Cui. Aiheesta aiemmin: Valolla ohjattavia moottoreita ja roottoreita Johdottoman lentävän hyönteisrobotin lentoonlähtö Molekyylirobotti ja lego-hiukkasia |
Nanotekniikka on tulevaisuuden lupaus. Näillä sivuilla seurataan elektroniikkaa sekä tieto- ja sähkötekniikkaa sivuavia nanoteknisiä tiedeuutisia.
 "Mikrorobotin suorittamat liikkeet tapahtuvat millisekuntien sisällä", kertoo PSI:n ja ETH Zürichin professori Laura Heyderman. "Mutta nanomagneettien ohjelmointi vie vain muutaman nanosekunnin. Tämä tekee mahdolliseksi ohjelmoida eri liikkeet peräkkäin. Tämä tarkoittaa, että pieni mikrolintu voi ensin läpyttää siipiään, liukua sitten sivulle ja sen jälkeen läpytellä uudelleen."
"Mikrorobotin suorittamat liikkeet tapahtuvat millisekuntien sisällä", kertoo PSI:n ja ETH Zürichin professori Laura Heyderman. "Mutta nanomagneettien ohjelmointi vie vain muutaman nanosekunnin. Tämä tekee mahdolliseksi ohjelmoida eri liikkeet peräkkäin. Tämä tarkoittaa, että pieni mikrolintu voi ensin läpyttää siipiään, liukua sitten sivulle ja sen jälkeen läpytellä uudelleen."