Mikroelektroniset robotit liikkeelle laserilla04.09.2020
Cornellin johtama yhteistyötutkimus on luonut ensimmäiset mikroskooppiset robotit, jotka sisältävät puolijohdekomponentteja, mikä antaa mahdollisuuden ohjata - ja saada kävelemään ne - tavallisilla elektronisilla signaaleilla. Nämä karkeasti parameciumin kokoiset robotit tarjoavat mallin vielä monimutkaisempien versioiden rakentamiseen, jotka hyödyntävät piipohjaista älykkyyttä ja ne voidaan tuottaa massatuotantona. Sellaiset voivat joskus kulkea jopa ihmiskudoksen ja veren läpi.
Niin yksinkertaista kuin pienet koneet saattavatkin tuntua, jalkojen luominen oli valtava saavutus. Näinkin pienen robotin ohjaustekniikka on toteuttavissa nykyelektroniikalla. "Mutta jalkoja ei ole ollut aiemmin", McEuen sanoi. ”Ei ollut pieniä, sähköisesti aktivoitavia toimilaitteita, joita voisit käyttää. Joten meidän piti keksiä ne ja yhdistää ne sitten elektroniikkaan." Käyttämällä atomista kerrostussaostusta ja litografiaa ryhmä rakensi jalat vain muutaman kymmenen atomin paksuisista platinaliuskoista, joiden toiselle puolelle asetettiin ohut kerros inerttiä titaania. Kun platinaan kohdistetaan positiivinen sähkövaraus, negatiivisesti varautuneet ionit adsorboituvat paljaalle pinnalle ympäröivästä liuoksesta varauksen neutraloimiseksi. Nämä ionit pakottavat paljaan platinan laajenemaan, jolloin nauha taipuu. Nauhojen ohuuden ansiosta materiaali taipuu jyrkästi murtumatta. 3D-raajan liikkeen hallitsemiseksi tutkijat muotoilivat jäykät polymeeripaneelit nauhojen päälle. Paneelien väliset aukot toimivat polven tai nilkan tavoin, jolloin jalat voivat taipua hallitusti ja tuottaa siten liikettä. Tutkijat ohjaavat robotteja heijastamalla laserpulsseja eri valokennoihin, joista kukin varaa eri settiä jalkoja. Vaihtamalla laseria edestakaisin etu- ja takaosien välillä, robotti kävelee. "Vaikka nämä robotit ovat toiminnallaan alkeellisia - ne eivät ole kovin nopeita, eikä niillä ole paljon laskentakapasiteettia - tekemämme innovaatiot, jotta ne olisivat yhteensopivia tavallisen mikrosirujen valmistuksen kanssa, avaavat oven näiden mikroskooppisten robottien tekemiseksi, nopeasti ja massatuotannolla”, toteaa tutkimusta johtanut Itai Cohen. "Tämä on oikeastaan vasta ensimmäinen viritys, jolla voimme integroida pienen elektronisen robotin." Robotit ovat varmasti huipputeknologiaa, mutta ne toimivat 200 millivoltin jännitteellä ja 10 nanowatin käyttöteholla ja ovat kokonsa suhteen vahvoja ja kestäviä. Koska ne on valmistettu tavallisilla litografisilla prosesseilla, ne voidaan valmistaa rinnakkain: Noin miljoona bottia mahtuu 4 tuuman piikiekolle. Aiheesta aiemmin Kohti älykkäitä mikrorobotteja |
Nanotekniikka on tulevaisuuden lupaus. Näillä sivuilla seurataan elektroniikkaa sekä tieto- ja sähkötekniikkaa sivuavia nanoteknisiä tiedeuutisia.
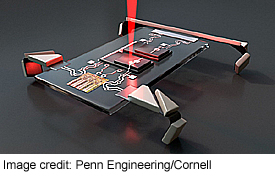
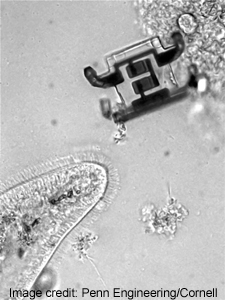 Uusien robottien paksuus on noin 5 mikronia, leveys 40 mikronia ja pituus 40-70 mikronia. Jokainen robotti koostuu yksinkertaisesta valosähköisestä piirakenteesta, joka toimii lähinnä vartalona ja aivoina sekä neljästä sähkökemiallisesta toimilaitteesta, jotka toimivat jalkoina.
Uusien robottien paksuus on noin 5 mikronia, leveys 40 mikronia ja pituus 40-70 mikronia. Jokainen robotti koostuu yksinkertaisesta valosähköisestä piirakenteesta, joka toimii lähinnä vartalona ja aivoina sekä neljästä sähkökemiallisesta toimilaitteesta, jotka toimivat jalkoina.