Parveilevaa ja loikkivaa robottitekniikkaa29.10.2021
"Monijalkaiset robotit voivat navigoida epätasaisessa maastossa ja ahtaissa tiloissa ja raajojen käyttö tarjoaa tehokkaan kehon tuen, mahdollistaa nopean ohjautuvuuden ja helpottaa esteiden ylittämistä", Ozkan-Aydin sanoo. "Ne kohtaavat kuitenkin myös ylittämättömiä liikkuvuushaasteita maanpäällisissä ympäristöissä."
Hänen kehittämät yksittäiset robotit suorittivat yksinkertaisia tai pieniä tehtäviä, mutta jos tehtävä ylitti yksittäisen yksikön kyvyn, robotit yhdistyivät fyysisesti toisiinsa muodostaen suuremman monijalkaisen järjestelmän eli parven voittaen ongelman kollektiivisesti. Aivan kuten ryhmä tulee avuksi kun muurahaiset kiskoessaan havunneulasia ja homma ei onnistukaan yhden voimin. Nelijalkaiset robotit tutkija valmisti 3D-tulostimella. Niissä jokaisessa oli litiumpolymeeriakku, mikrokontrolleri ja kolme anturia - valoanturi edessä ja kaksi magneettista kosketusanturia edessä ja takana, jolloin robotit saattoivat muodostaa yhteyden toisiinsa. Neljä joustavaa jalkaa vähensi lisäanturien ja osien tarvetta ja antoi roboteille mekaanisen älykkyystason, mikä auttoi vuorovaikutuksessa epätasaisessa maastossa. MIT:n tutkijat ovat puolestaan opettaneet nopean gebardi-robottinsa hyppäämään ojien ja rotkojen yli. Tällaisessa tehtävässä tarvitaan näkökykyä.
Margolis ja hänen yhteistyökumppaninsa kehittivät järjestelmän, joka parantaa jaloilla operoivien robottien nopeutta ja ketteryyttä hyppäämään maaston aukkojen yli. Uusi ohjausjärjestelmä on jaettu kahteen osaan, joista toinen käsittelee reaaliaikaista tuloa robotin etupuolelle asennetusta videokamerasta ja toinen, joka muuntaa nämä tiedot ohjeiksi siitä, miten robotin tulisi liikuttaa kehoaan. Toisin kuin muut nelijalkaisen robotin ohjausmenetelmät, tämä kaksiosainen järjestelmä ei vaadi maaston kartoittamista etukäteen, joten robotti voi mennä minne tahansa. Kahden erillisen ohjaimen lisäksi työssä hyödynnettiin aiheen parhaita puolia aiemmista töistä sekä ohjaimien hierarkiaa ja lisäksi vahvistusoppimisena tunnettua kokeilu-erehdys menetelmää korkean tason ohjaimen kouluttamiseen. Aiheesta aiemmin: Ketterin koskaan rakennettu robotti Robotti ottaa ajotarkkuuden hallintaansa Kohti älykkäitä mikrorobotteja |
Nanotekniikka on tulevaisuuden lupaus. Näillä sivuilla seurataan elektroniikkaa sekä tieto- ja sähkötekniikkaa sivuavia nanoteknisiä tiedeuutisia.
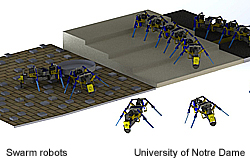
 Aiheen innoittama, Ozkan-Aydin oletti, että jaloin operoivat robotit, jotka koostuvat palautuvasti ketjutettavista modulaarisista yksiköistä ja joilla on sopivat passiiviset hämminkien hallintamekanismit, voivat tehdä erilaisia tehtäviä vaihtelevassa maastossa ilman monimutkaista hallintaa ja havaitsemista.
Aiheen innoittama, Ozkan-Aydin oletti, että jaloin operoivat robotit, jotka koostuvat palautuvasti ketjutettavista modulaarisista yksiköistä ja joilla on sopivat passiiviset hämminkien hallintamekanismit, voivat tehdä erilaisia tehtäviä vaihtelevassa maastossa ilman monimutkaista hallintaa ja havaitsemista.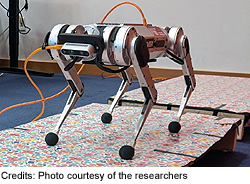 ”Vaikka on olemassa menetelmiä vision sisällyttämiseksi jalkojen liikkumiseen, useimmat niistä eivät oikeastaan sovellu käytettäväksi kehittyvien ketterien robottijärjestelmien pariin”, sanoo Gabriel Margolis, PhD -opiskelija MIT:ssä.
”Vaikka on olemassa menetelmiä vision sisällyttämiseksi jalkojen liikkumiseen, useimmat niistä eivät oikeastaan sovellu käytettäväksi kehittyvien ketterien robottijärjestelmien pariin”, sanoo Gabriel Margolis, PhD -opiskelija MIT:ssä.